����: Maksim Apanasenko, Boaz Kramer, Ze'ev Kirshenboim.
ACS Motion Control
��B
�S��I(y��)��(y��ng)��, �댧(d��o)�w���A�z�y(c��)�y(c��)ϵ�y(t��ng), �ЙC(j��)�l(f��)����O��ƽ���@ʾ�����a(ch��n)�͙z�y(c��)��,�@Щ��(y��ng)��Ҫ��O��ߵ��\(y��n)��(d��ng)���ܣ��ڵ��ل����\(y��n)��(d��ng)�ļ{��(j��)�\(y��n)��(d��ng)�б��ց��{��(j��)���oֹ����(d��ng)���S�`�Ŀǰ�����ŷ��(q��)��(d��ng)�ѽ�(j��ng)����(y��ng)���ڝM���@Щ�����@�N�(l��i)�͵��(q��)��(d��ng)���ṩ���@�˵����ܣ������_(d��)���@Щ��(y��ng)����Ҫ�ľ��Զȡ��������ھ����ŷ��(q��)��(d��ng)��Ч�ʵͣ���p�Ĵ��w�e���ء���һ��450mm�댧(d��o)�w��Ŀǰ��300mm�댧(d��o)�w��ö࣬�����@�ӵ�ϵ�y(t��ng)��Ҫ�(q��)��(d��ng)�����и��ߵ����������ߵ�늉���������@��Ҫ�����(q��)��(d��ng)���w�e�dz��������������ޣ�����������@��(g��)ϵ�y(t��ng)�����ܺ����a(ch��n)����������ϵ�y(t��ng)�ɱ���������ϵ�y(t��ng)�ɿ��ԡ�
NanoPWM���_(k��i)�P(gu��n)PWM�(q��)��(d��ng)���ľ��Ի����@�N���Ի�����һ�N��(d��)�صČ�(zhu��n)�����g(sh��)��
���^(gu��)ȥ5����ACS�аl(f��)��PWMBoost���ԝM���@�ӵ�λ��ϵ�y(t��ng)��NanoPWM�(q��)��(d��ng)���ṩ���õ�λ�����ܺ��S���ܣ����ҿ˷��˾����(q��)��(d��ng)����ȱ�c(di��n)��NanoPWM�dz��o�����и��ߵ�Ч�ʺͿɿ��ԣ������ṩ���ߵ�������������Դ�����Ҹ���(j��ng)��(j��)��
�ŷ��(q��)��(d��ng)���ķN�(l��i)
�ɷN��Ҫ���ŷ��(q��)��(d��ng)���������(q��)��(d��ng)�����_(k��i)�P(gu��n)PWM�(q��)��(d��ng)����
�D1���L�˾����(q��)��(d��ng)����ԭ����D���@��(g��)�(q��)��(d��ng)����һ��(g��)��׃���һ�ӹ���������(j��)��������ؓ(f��)�d�迹�{(di��o)��(ji��)��������늉����������R�_(d��)���(q��)��(d��ng)��֮ǰ����(d��ng)�R�_(d��)�Ե����\(y��n)�б�Ҫ���ṩ�����ؕr(sh��)��������Ǹߵģ������R�_(d��)�ϵ�늉����ǵ͵ģ������(q��)��(d��ng)���ϵ�늉����Ǹߵġ��˕r(sh��)�(q��)��(d��ng)���ēp���Ǻܸߵġ�
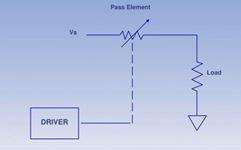
�D1�����(q��)��(d��ng)����ԭ��D����
�D2�������_(k��i)�P(gu��n)PWM�(q��)��(d��ng)��ԭ��D��D���(q��)��(d��ng)������ͨ���_(k��i)�P(gu��n)�������R�_(d��)����ƽ������ľC�ϼ��ɡ�ƽ��������_(k��i)�P(gu��n)ռ�ձȵľ��Ժ���(sh��)������o���r(sh��)���_(k��i)�P(gu��n)�����ǔ��_(k��i)�ģ��](m��i)��������^(gu��)�_(k��i)�P(gu��n)�������nj�(d��o)ͨ�ģ��е�늉������_(k��i)�P(gu��n)�ϣ�������_(k��i)�P(gu��n)�p���Ǻܵ͵ġ�

�D2��PWM�(q��)��(d��ng)����ԭ��D����
.
��1.���N�(l��i)���(q��)��(d��ng)���ă�(y��u)ȱ�c(di��n)���Y(ji��)
��1�����N�(q��)��(d��ng)���ă�(y��u)ȱ�c(di��n)

����

��3-�댧(d��o)�w���A�{(l��n)�D
�댧(d��o)�w���A�z�y(c��)ϵ�y(t��ng)Ҫ�{��(j��)���oֹ�`��ͼ{��(j��)���S�`����죬�����(sh��)ϵ�y(t��ng)�Ǟ���̎��ֱ��300mm �ľ��A����һ�����A��ֱ�����_(d��)��450mm���@Ҫ����ͬ�ӻ��߸��õ�λ�ÿ������ܣ����ڳߴ�����������҂���Ҫ������R�_(d��)���(q��)��(d��ng)����(l��i)���ֺ����ϵ�y(t��ng)�����������@�ӵ�ϵ�y(t��ng)Ҫ���(q��)��(d��ng)�����о����(q��)��(d��ng)����PWM�(q��)��(d��ng)�ă�(y��u)�c(di��n)��NanoPWMTM�����@�ӵ��(q��)��(d��ng)�������ܸ�Ч�����Ԍ�(sh��)�F(xi��n)��늉��������ṩ����������ܾo�����ҳɱ����͡�
�D4��5��B��NaonPWM����Ҫ���c(di��n)��
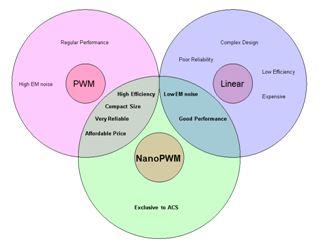
lowEM noise :��늴���
good performance�����õ�����
High efficiency������
Compact size���Y(ji��)��(g��u)�o��
Very reliable���dz��ɿ�
Affordable price���ɽ��ܵăr(ji��)λ
Regular performance��һ������
High EM noise ����늴���
Complex design���O(sh��)Ӌ(j��)��(f��)�s
Poor reliability ���ɿ����^��
Low efficiency��Ч�ʵ�
Expensive����r(ji��)��
�D4-NanoPWM�����˾����(q��)��(d��ng)����PWM�(q��)��(d��ng)���ă�(y��u)�c(di��n)

�D5-��ͬ���ʵľ����(q��)��(d��ng)����PWM�(q��)��(d��ng)���ijߴ猦(du��)��
���ܱ��^
�y(c��)ԇϵ�y(t��ng)����һ��(g��)�o(w��)�N��ֱ���R�_(d��)����(d��ng)��ֱ��ƽ�_(t��i)������L���S�ЙC(j��)е�ͻ����ֱ��ʞ�0.4mico-meter��magnascale����ģ�M��SIN-COS���a�����\(y��n)��(d��ng)����ϵ�y(t��ng)����ACS MC4U����ģ�K�����N��ͬ���(q��)��(d��ng)��
• NanoPWM
• Standard PWM��(bi��o)��(zh��n)PWM�(q��)��(d��ng)��
• Standalone linear drive�Ϊ�(d��)�����(q��)��(d��ng)��
��ÿ��(g��)�y(c��)ԇ�У��(q��)��(d��ng)�����㷨���M(j��n)��һ�����{(di��o)ԇʹ���_(d��)���(y��u)���ܺ����ƵĎ�����
���2���������(q��)��(d��ng)��������ͬ������

Table 2 �C �(q��)��(d��ng)������Ҫ����ָ��(bi��o)
�y(c��)ԇ��������ָ��(bi��o)��
�oֹ����(d��ng)
���ٸ��S�`��
�oֹ�`�NanoPWMvs�����(q��)��(d��ng)��
�y(c��)ԇ�Y(ji��)���ڱ�6�У����Y(ji��)�ڱ���3��
��6 �CNanoPWM���tɫ��VS�����(q��)��(d��ng)�����Sɫ���oֹ����(d��ng)

Table 3 - NanoPWM (�tɫ) VS �����(q��)��(d��ng)�� (�Sɫ) �oֹ����(d��ng)
ʹ��NanoPWM�(q��)��(d��ng)����ʹ�þ����(q��)��(d��ng)���r(sh��)���oֹ����(d��ng)���@�pС��С4.5����0.8nmVr3.6nm��
���ٸ��S�`��-NanoPWM VS�����(q��)��(d��ng)��.
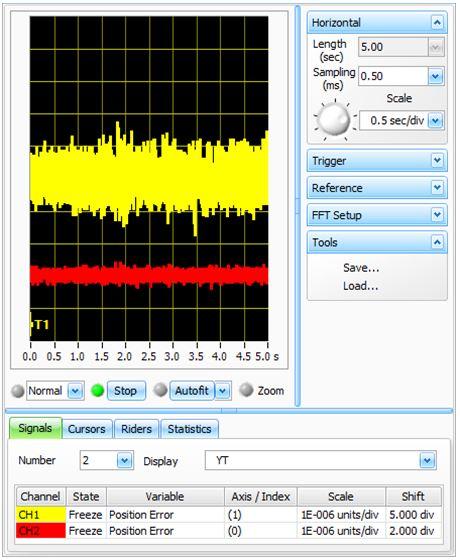
���S�`������1mm/s���ٶ��y(c��)���ģ��y(c��)ԇ�Y(ji��)���ڱ�D7�У����Y(ji��)�ڱ���4��

�D7 NanoPWM�(q��)��(d��ng)�����tɫ��VS�����(q��)��(d��ng)�����Sɫ���ĸ��S�`��
NanoPWM �����(q��)��(d��ng)��

Table 4 - NanoPWM (�t) VS�����(q��)��(d��ng)�� (�S) ���S�`��
ʹ��NanoPWM�(q��)��(d��ng)���r(sh��)���S�`�����@�pС���Y(ji��)���õ���ƽ�����\(y��n)��(d��ng)܉�E���@�ӵ�܉�E�ھ��A�z�y(c��)�^(gu��)����ʮ����Ҫ��
�oֹ�`��-NanoPWM VS��(bi��o)��(zh��n)PWM�(q��)��(d��ng)��
�y(c��)ԇ�Y(ji��)��Ҋ(ji��n)�D8����5�M(j��n)���˿��Y(ji��)

�D8-NanoPWM���tɫ��vs PWM���Sɫ���oֹ����(d��ng)

Table 5 - NanoPWM (�tɫ) VS PWM drive (�Sɫ) �oֹ����(d��ng)
ʹ��NanoPWM�(q��)��(d��ng)�����oֹ�`���ʹ�Ø�(bi��o)��(zh��n)PWM�(q��)��(d��ng)��С�ɂ�(g��)��(sh��)����(j��)��ƽ���@ʾ���ӹ�ϵ�y(t��ng)���^����(du��)���R�_(d��)늉��������Ҫ���^(gu��)��Ŀǰ�̘I(y��)���˵ľ����R�_(d��)�����S�������ЙC(j��)LED�@ʾҪ����ߵľ��_�ȣ����S���Ⱥ��oֹ����(d��ng)����Ҫ�ڎׂ�(g��)�{���`�����(n��i)��NanoPWM�o�@�ӵ���������˽�Q������
���Y(ji��)
���Ľ�B��һֱ���͵ľ����_(k��i)�P(gu��n)�ŷ��(q��)��(d��ng)��-NanoPWM,�@�N�(q��)��(d��ng)�����о����(q��)��(d��ng)����PWM�(q��)��(d��ng)�������Ѓ�(y��u)�c(di��n)��ʹ��NanoPWM�(q��)��(d��ng)���õ����\(y��n)��(d��ng)���ܳ��^(gu��)��Ŀǰ�ѽ�(j��ng)�̘I(y��)���˵ľ����ŷ��(q��)��(d��ng)�������ܡ��@�N�(q��)��(d��ng)����С�����ɿ��������ˡ�
�@�N�(q��)��(d��ng)�����ԝM����ߵ��\(y��n)��(d��ng)���������m�ϰ댧(d��o)�w���A�z�y(c��)��ƽ���@ʾ������ϵ�y(t��ng)�� |

��Ϣ")