����ϵ�y�ڮ����Ƕ��ʽ���I�����зdz���Ҫ����С���ֳ��O�䵽���صęCе�O�䡣������Ԅӿ���ϵ�yʹ��ؓ�������������텢��������λ�á��ٶȡ�Ť�ء�늉�����������ȵȡ�
Ҫ���Ƶą����ɂ������Мy��������ݔ�����c����ֵ�M�б��^���ą���ݔ����̖�Мpȥ�ɘ�ݔ����̖�Q��ؓ���������̖���Q�顰�`���Ȼ�Ŵ�����ϵ�y���Q�顰�ӡ�����ʹݔ���ӽ�����ֵ��
�Q��Ԓ�f��ԓϵ�yּ�ڻ��`����̖�������һ���]�h����ϵ�y���C�ϵ�y�����˂��y����ϵ�y�ЏV�����I������늙C������һ�N���õđ��á�
ͨ����늙C����ϵ�y�֞��ٶȡ�λ�û�����Ƶ���ϵ�y���҂���һ�����ε��ٶȿ���ϵ�y�_ʼ���҂���������늙Cʩ�Ӻ㶨늉� (V)��Ĭ�J��r�£��κ�늙C���ض��Դ늉� (V) �¶����ض��ٶ� (x) ���D���������ͬ��늉� (V) ��늙Cʩ��ؓ�d���t늙C���ܕ��p�����ٶ� (y)����ˣ��҂��o������늙C���ٶȻ�ʹ늙C�ڲ����κ��ⲿ����Ӱ푵���r���Ժ㶨�ٶ����D���@��һ���_�hϵ�y����ˣ��҂���Ҫһ�N�����C�Ɓ��Б�늙C���ٶȲ��a���@Щ���ء�
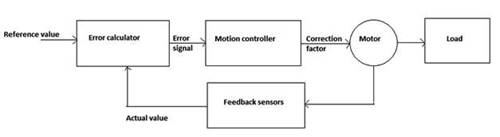
�D 1������늙C�ٶȵ��]�hϵ�y
�D 1 �@ʾ��һ���]�h늙C����ϵ�y�����@��\�ӿ��������ķ���ϵ�y�@�õ���̖�c�o���Č��Hݔ���M�б��^���ԫ@���`����̖��Ȼ����Ŵ�����늙C�����@��ϵ�y�У��\�ӿ������ͷŴ����K��У���������͵�늙C����ͨ�^�����̖���������F����W���D���a������������������������ԓ�M����ݔ����̖����ͨ�^�������p�ɽ�a. �����ṩ�ˌ��@Щϵ�y�K�е�ÿһ�����Mһ����ጡ�
ֱ���Ͳ��M늙C
늄әC������D�Q��Cе�ܡ����ڸ����ИI��һЩ��Ҋ늙C������
ֱ��늙C�� ���ε�ֱ��늙C���S��ʹ�þ�Ȧ�@�M�����й̶��������w���D 2������늉� (V) ʩ�ӵ���Ȧ�r����� (i) ���^�������ڴ��ڴň� (B)���� (F) �����ھ�Ȧ�ϣ��������R��˹���ֶ��t����ʹ�����D��һ����Ȧ���_�����w��һ���ŘO�����͕��ܵ��ų���������һ���ŘO�Ƅӡ��@�漰�B�m���D�����ٶ���ʩ�ӵ�ֱ��늉��Q����
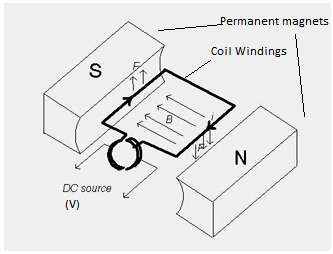
�D 2��ֱ��늙C�Ĺ���
���M늙C�� ���Ų��M늙C�������D�ӡ���Ȧ�@�M�͌��Ŷ��ӽM�ɡ�
�o��Ȧ�@�Mͨ늕��a��һ�����б��O���ϘO��늴ň������Ӕy���ň�������ͨ�^�����M�����Ӿ�Ȧ����׃�ň����@���a�����D�\�ӡ�
����늙C�Ĺ�����D 2��ʾ���ڲ��E 1 �У����ඨ�ӵ� A ��ͨ늡��@�����D�Ӵ����i������ʾλ�ã���鮐�O�������ڲ��E2�У�A���P�]��B���_����ʹ�D��형r����D90�㡣�ڵ� 3 ���У�B ���_�������O���c�� 1 ���෴��������һ�� 90�� ���D���ڲ��E4�У�A���P�]��B����_���O���c���E2�෴���؏ʹ�����ʹ�D���� 90�� �IJ��L형r����D��
�ڲ��M늙C�У�늙C���D���ٶ��Ɉ��в��E 1 �� 4 ���ٶțQ����
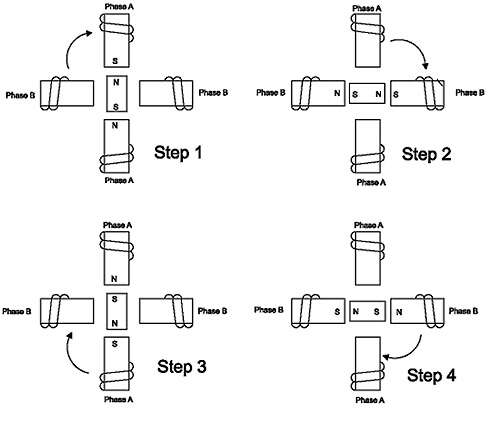
�D 3�����M늙C�Ĺ���
���D���a��
늙C����ϵ�y����һ�����Ƿ����������������ԙz�y늙C�Ġ�B�����䷴���o�����������D���a����һ�N���εęC��O�䣬���Ԟ����S�ϵ�ÿһ�����D�a�����m���}�_�������Է֞�ɷN��ͣ����a�����������a����
���a���� ���a����늙C�S��ÿ��λ���ṩ�̶�ݔ�������磬������a�������� 0�㣨�̶�����45�㡢90�㡢135�㡢180�㡢225�㡢270�㡢315�㣨���� 8 ��λ�� - 45�� �ֱ��ʣ��ĽǶșz�y�S��λ�ã�һ�� 3 λ��ֵ������oÿ��λ�ã������ 000 �� 111��
�������a���� ʹ���������a����ֻ�ܴ_��늙C������λ�ã�����ֻ�ܴ_����������ǰλ�õ����D����ͽǶȣ����������a���l���ɂ���̖��A �� B�����]�����D�r���@�ɂ���̖����һ��Ĭ�Jֵ������߉ 0 ��߉ 1�����S����һ��С�Ƕ����D�r����̖ A �� B ���D�Q������߉���m�r�g�̣ܶ�Ȼ�ص�Ĭ�Jֵ������ÿ���@�ӵ����D��A �� B ��̖�����l���D�Q���������D����A �е��^�ɕ����� B �е��^�ɣ���֮��Ȼ���D 4 �@ʾ��형rᘺ���r����D�� A �� B ��̖��
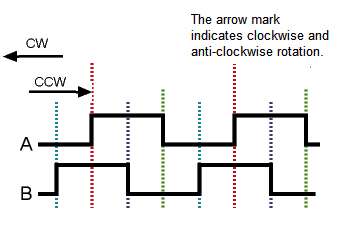
�D 4����̖ A �� B ���D�Q
���D���a��߀���Ը�����ʹ�õĹ���ԭ���Mһ����������ǣ�
�Cе���a������̖ A �� B ���D�Q�������c���ٽӵأ�߉ 0�����|�r�l����һ����һ����
���Ծ��a�����D���S�S�D�ӣ�������A���܇����������Ҿ���ֲ��ı��O���ϘO�������������������ķ���z�yλ�ú����D������@ЩС׃����
��W���a�������l����O�ܵĹ⾀���^һ���A�P��ԓ�A�P���S�������Ͳ������֡��侀�Ƀɂ����̽�y���������� A �� B���z�y��Ȼ��a�������}�_ A �� B��
�D 5 �@ʾ��һ��ʾ���Cе���a����

�D 5���C��D���a��
�ٶȜy���O�䣺 �D�ٱ�V�����ڜy��늙C���D�١�늙C���S�B�ӵ������ֱ���l늙C���D�ٱ����������ęCе���Юa����ܣ���ݔ���c늙C���D�ٶȳɱ�����ֱ��늉����D 6�����D��Ӌ�a����늉������Mһ��̎����
����S���OӋ�ˆT�����D�����D���a���������������ÿһȦ���D���ɔ���ݔ��������Ҳ�������D�ٱ��ǘ���ĥ�p���˻��������D���a����ݔ�����͵��������ṩ��һ�Nֱ�ӵķ������Oҕ�Ϳ��������D���a�������������늙C���ٶȡ�
�D 6���B�����D���a���cֱ��늙C
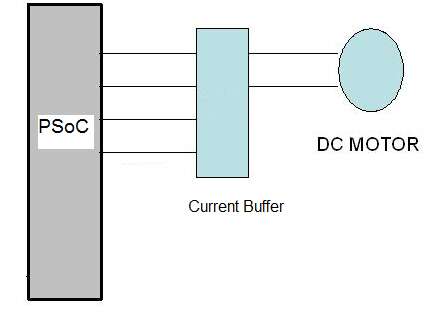
�\�ӿ������K�� ��Ҫ�\�ӿ������������ٶ��c���H�ٶ��M�б��^�������`����̖�����o늙C����������ӑՓ�����D���a�����ɂ�������λ��̖ A �� B���҂���Ҫ���F߉����a�@Щ��̖���Мy늙C�Į�ǰ�ٶȡ�ͨ�^Ӌ��Мy�ٶ��c���H�ٶ�֮�g�IJ���҂����Ԟ�늙C�ṩһ��У�����ӣ�ʹ���_��������ٶȡ����ڿ���늙C���Դ���Կ������D�٣����Ҫ�ṩ��У�������漰���o���Դ늉��M���m����늉�У����
ʹ�ÿɾ��� SoC �M��늙C����
���²���Ԕ�������˴��ٶȿ��Ƒ��ã�����ِ����˹ PSoC 3/5 �����\�ӿ��������M�ܿ���ʹ���S�����������д˲������� PSoC �����`��Ŀ�ҕ��Ƕ��ʽ�OӋ���������а����A���á��Ñ����x�����O�ͷ�ԭ��D�lĿ����߀�����߾��ȿɾ���ģ�Mģ�K������ 12 �� 20 λ delta-sigma ADC������߉�졢�Դ�����͌�늙C���Ƒ������õ��B���YԴ��
����҂������a�������D���a������̖���M���Mһ��̎�����҂�ͨ���������ͨ��������ʹ���Д����̣��@����ֹ�ڞ�ԓ�Д������ṩ���Օr�����������ܡ�
���ڿɾ��� SoC �O�䣬���������ІΪ��Ĕ��։K/Ӳ���K�����Խ�a�@Щ������̖��A �� B�����惦��ǰӋ��ֵ�����Ԅ��f�����f�p����
�ڷ�����·�У�����҂�ͨ�^늙C�m������늙C�S�����ٶ�Ҫ�y�����c���D���a�����S�B�ӣ��@���ܕ��o늙C���d�������a�����S�����c늙C��ͬ���ٶ����D���@Щ���a����ݔ���������͵� PSoC 3/5 �п��õ�������a��ģ�K�����M���Mһ��̎�����������F���͵�늙C����ϵ�y��
늙C���Ƒ���ʾ��
늙C���P���õij�ҊҪ��֮һ�ǡ��ٶȜy��������ǰ��������ǰӋ��ֵ���Դ惦�ڽ�a��ģ�K�С�ʹ���@�����҂�����ͨ�^�y��ÿ��犵�Ӌ��ֵ��y��늙C���ٶȣ����늙C���ٶ�ͨ����ÿ����D����y����
���磬ÿ��犺��҂���������Ӌ��ֵ�������҂�����ʹ��Ӌ���IJ�M��Ӌ�㡣�o��ȴ�һ��犣���������ÿ��y��Ӌ��ֵ��Ȼ����� 60���M���@���ܟo���ṩ�cÿ��犜y�����@�õ�ֵһ�ӵ�ֵ����ˣ�늙C���D�ٿ���Ӌ���

��ʽ 1
���磬���O�҂���Ҫ�����M늙C���ٶȱ����� 6000 rpm�����]��һ���_�hϵ�y���҂�ֻ��Ҫһ�����������M늙Cݔ��������̖��ʹ���� 6000 rpm ���ٶ���һ���������D��Ȼ�������҂��o늙C����ؓ�d�r��늙C���ٶȕ����͵�����ԓ�\�еČ��Hֵ���¡���ˣ��҂��o���_��������ٶȣ�Ҳ�o���{������
����ʹ�ٶȱ�����һ���ض�ֵ�������]늙Cؓ�d��׃�����҂���Ҫ��ѭ�]�hϵ�y��ԭ������ǰ�������҂�ʹ�����D���a�����Мy�ͷ�����ǰ�D�١��҂������a�����x��ȡ�Q�����D�ٶȺ�������ٶȾ��ȡ��������D���a������̖ʹ�� PSoC Creator �����ṩ����·��a��ģ�K�M�н�a��
���m�ĕr��l�ʱ�·�ɵ���·��a��ģ�K�����wȡ�Q��늙Cÿ��犵����D�������磬����D�ٞ� 9000 rpm���t�D�Q��ÿ�� 150 �D��������a��ÿ�DһȦ�o��4���}�_�����a�����ԣ�����ô��aģ�K��Ҫ�ĕr��l�ʞ�150*4*10=6kHz����A��B��̖��10������
�����҂���Ҫÿ���ۙӋ��ֵ���҂�����ÿ 1 ��a��һ���Дࡣ���Д���������У��҂����Բ��@Ӌ���Ĵ���ֵ��Ȼ�������㣨�������ڜy����һ����ٶȣ�����ʹ�õ�ʽ 1 ���Դ_��늙C���ٶȡ�
�ɂ��о���PSoC �c MCU ��ʩ
���ɂ��г���ֱ��늙C�Ŀ����Դ�Լ���������߉��
��r 1��ʹ����ͬ�� PSoC 3/5 ͨ�^������_����ֱ��늙C�����磬���ֱ��늙C��Ҏ�����ڿ��d�l����ʹ�� 5 V �Դ���� 88 mA���҂������B�� PSoC ��ݔ��3/5��ֱ��늙Cͨ�^һ��������·����D7��ʾ��
�D 7��ͨ�^ PSoC �ӵ�ֱ��늙C
�mȻ�o���˺㶨�� 5V ֱ���Դ����늙C���մ�̎��ʾ����ȫ�٣��� 9000 rpm�����D����W���D���a���c늙Cһ������ͬ���ٶ����D������ʹ�� PSoC 3/5 �еĽ�a���y�����a����ݔ�����F���������z�y���ٶȞ� 9000 rpm���������c����ֵ���� 6000 rpm ���H�ٶȵ� 2/3 �����M�б��^��У��푑��� -3000 rpm������-1/3 ���ڮ�ǰ�ṩ�o늙C��늉�����
�@�N늉�׃������ʹ�� PWM �팍�F��ͨ�^��׃ PWM ��ռ�ձȣ����Ը�׃ƽ��늉���PSoC Creator ����һ���Ϸ�ʽ PWM ģ�K���ṩ�o PWM ģ�K�ĕr��l��ȡ�Q�ڑ���������ٶȷֱ��ʡ�
�@�������ռ�ձȞ� 2/3����ˣ�PWM ģ�Kÿ�����ڵ�ƽ��ݔ��늉��� 5*2/3 = 3.33 V��PWM ģ�K��ݔ���ṩ�o�B�ӵ�ֱ��늙C��������·��ֱ��늙C�F��������� 6000rpm �ٶ����D�����D���a���ٴθБ��ٶȣ��z�y�� 6000 rpm�������䷴���o���������F���`��ϵ���� 0��PWM ��������ǰ�Ġ�B��늙C�������ٶȡ�
���O��늙C����ؓ�d���mȻռ�ձȱ����� 2/3����늙C���ٶ��½��� 5000 rpm���F�����D���a���z�y�ٶȲ��������͵� PSoC 3/5���F�ڣ��`�����Ӟ� +1000 rpm������ԭʼ/�����\���ٶȵ� 1/9����ˣ�PWM ��ռ�ձ������� 1/9 ������ǰռ�ձ� = 2/3+1/ 9 = 7/9)��ԓ��ͨ�^�̼����� PWMDigital �K��
2��ֱ��늙Cͨ�^ MCU ��늡����ֱ��늙Cͨ�^��һ����������늣��t PSoC ������������ͨ�^ I2C �Ƚӿڌ�늙C�Į�ǰ��B�����o��һ�������������ֱ��늙Cͨ�^�ⲿ늳ع�늣��t����ͨ�^�D 8 ����ʾ��߉�p�ɿ������ٶȡ�PSoC �� PWM ݔ���������͵��_�P��ԓ�_�P�����_�����ض�ռ�ձ��ГQ늙C�Դʹ������c��ǰ��ͬ�Ę˜ʡ� |