�ڬF��늙C�����I�ň�������ƣ�Field-Oriented Control, FOC���{�����Ч�����ʵ����ԣ��ɞ��ӽ���늙C�ĺ��ļ��g���oՓ�ǹ��I�C����߀�Ǽ��������FOCͨ�^ģ�Mֱ��늙C�Ŀ��Ʒ�ʽ������������ֽ���D�غ̈́�ŷ������@�������˄ӑB푑��c��Ч�������Ƿ���ه�����������FOC�֞��и�FOC�c�o��FOC�����߸��Ѓ��ӣ��m���ڲ�ͬ���������Č����������ԭ�������c�����á�
FOC�ĺ���˼����ͨ�^����׃�Q��Clarke/Park׃�Q���������ཻ��늙C�Ķ�������D�Q�����D����ϵ�µ�ֱ�S��Id����ŷ������ͽ��S��Iq���D�ط����������@������ϵ�У�Id��Iq�քe�����M�Ъ������ƣ�����ͬ����ֱ��늙Cһ�ӣ��Ķ����F��늙C���D�١�λ�ú��D�صľ��_���ơ�
�и� FOC �㷨ͨ����Ҫʹ�ôł������������������������W���a����ž��a�������������_��֪늙C�D�ӵ�λ�ú��ٶȡ��乤��ԭ���ǻ��ڴň����������Փ��ͨ�^�������@ȡ�D�ӵČ��rλ����Ϣ����늙C�����������늉�׃�Q�����D�Ӵň��鶨������D����ϵ��dq �S�����M�п��ơ�ԓ�㷨�ă��c�ǿ��ƾ��ȸߡ������Ժã��܉��ڸ��N���r���F늙C�ľ��ʶ�λ���D�ٿ��ƣ��m���ڌ����ƾ��Ⱥ̈́ӑB����Ҫ���^�ߵĈ��ϣ��繤�I�C���ˡ����ؙC�������պ�����I��ȱ�c����Ҫ�~�ⰲ�b��������������ϵ�y�ijɱ������s�Ⱥ��w�e��ͬ�r�������İ��b�;S�oҲ��Ҫһ���ļ��g�ͳɱ������^���и�FOC����Ă��������ӿ��·����Ӳ���ɱ�����ռ�ð��b���g��ͬ�r�������������ӡ����۵Ȑ��ӭh������ʧЧ��
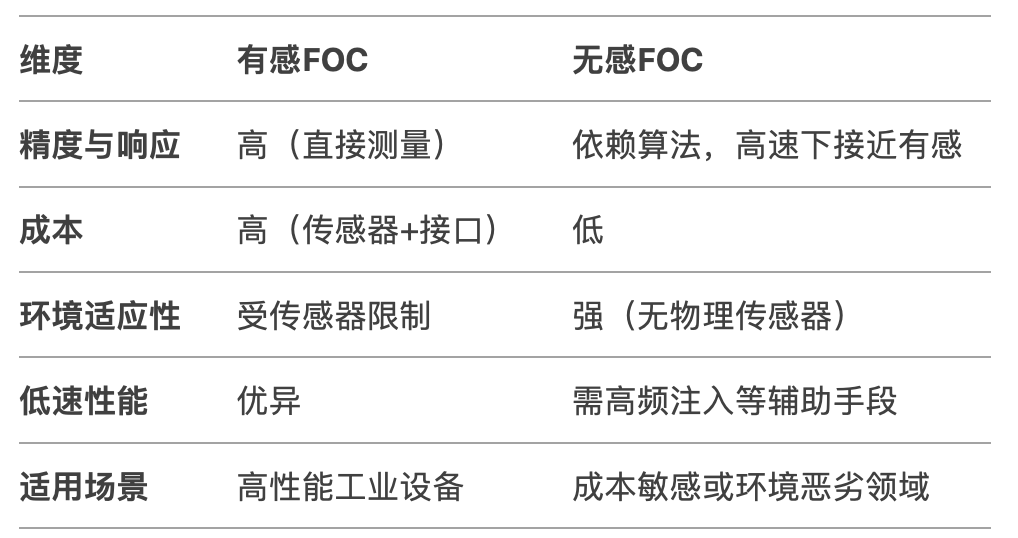
�o�� FOC �㷨�t����Ҫʹ�Ì��T��λ�Â�������z�y�D��λ�ã�����ͨ�^�z�y늙C�����������늄ӄݻ�����늚��������Ï��s���㷨������늙C�D�ӵ�λ�ú��ٶȡ���Ҋ�ķ����л��ڷ�늄ӄݷ������Ӵ�朷���늸з��ȣ�Ҳ�в���λ���^�y���ͷ����л��i��h��PLL��Ӌ��ĽM�ρ혋��λ���^�y�㷨���o�� FOC �㷨ͬ���nj�늙C�������늉��M������׃�Q���� dq �S����ϵ���M�п��ƣ����D��λ�ú��ٶȵī@ȡ��ͨ�^���ɘӔ�����Ӌ��ͷ����õ��ġ��@�N�㷨�ă������ڽ�����ϵ�y�ɱ�������˿ɿ��ԺͿ��ɔ_�ԣ��p����늙C�w�e�͏��s�ȣ��m���ڌ��ɱ����С����b���g�����Ҍ����ƾ���Ҫ���ǘO�ߵĈ��ϣ�����������늄ӹ��ߡ����I�L�C�ȡ����^���o�� FOC �㷨��ȱ�c���ڵ��ٕr�����ڷ�늄ӄ��^С����̖�z�y��̎���y�ȴ��¹��㾫���½����������ܲ����и� FOC �㷨�����㷨���s���^�ߣ�����������Ӌ��������һ��Ҫ���C���������и�FOC�͟o��FOC֮�g�Č������D��ʾ��
�и�FOC�͟o��FOC�P�I������������δ�����S��оƬ�����������c�����㷨�����M���o��FOC���B���߶��I�����磬����Դ��܇��������ϵ�y�У��o�з����������ݿ��ƣ����ں�AI�������������g���Mһ�������˟o��FOC���m���ԡ�Ȼ�����ڽ^�������c�ɿ���Ҫ��O�ߵĈ������纽�졢�ŷ������и�FOC�������x�� |